AGRICULTURE

The automated driving systems (ADS) for Rural America demonstration project, initiated by the University of Iowa’s National Advanced Driving Simulator (NADS) transportation safety research centre and funded by a $7 million USD grant from the U.S. Department of Transportation (DoT), was established to identify challenges, opportunities and much needed insights relevant to advancing the safe operation of automated vehicles in non-urban conditions.
“It’s not about delivering a fully automated solution,” explained Omar Ahmad, NADS deputy director and project manager for the ADS for Rural America demonstration project. “Our goal is to demonstrate current autonomous capabilities on a complex rural route and then document where it works and, more importantly, where and why it doesn’t work. The primary output of this project is an organised dataset on vehicle performance.”
To that end, the University of Iowa (UI) team designed a 75 kilometre (47 mile) loop from Iowa City through rural areas and small towns (Kalona, Riverside and Hills) that represent many of the different roadways an automated vehicle might navigate in a rural environment. Along the way, the vehicle will encounter inconsistent lane markings and surface conditions, a great disparity in the speed and type of vehicles using the roadway like farm equipment, and inclement weather, including heavy snow that obscures paved surfaces. Outside Kalona, the vehicle shares the road with horse-drawn carriages from a nearby Amish community.
“We didn’t want to just cherry-pick roads that are going to be easy,” Ahmad said. “We really wanted to throw real-world U.S. roads at it so we can get an honest assessment. [Automated vehicles] should work just as well on these types of roadways as in cities and on interstates.”
With a route in mind, Ahmad and his team approached Hexagon | AutonomouStuff with their plan and a simple question: What technology is available to achieve Levels 3 and above of automation recognised by the Society of Automotive Engineers?
The goal of the ADS solution is to gather automation vehicle performance, road conditions (e.g., surface grip, layer thickness, surface temperature), weather conditions as well as the physiology of riders and safety drivers to assess their stress or anxiety.
For vehicle performance, the UI team evaluated several different technology stacks from AutonomouStuff, looking at the pros and cons of each for the route. The vehicle and technology selected is a custom-built drive-by-wire Ford Transit 350HD passenger van, ideal for people with limited mobility and disabilities, equipped with a modified suite of sensors, hardware and the customised Apollo autonomous driving platform deployed by AutonomouStuff.
The Customised Research & Development Platform includes:
The technology stack, including power distribution, high-speed ethernet switches, two computers (one for LiDAR and RADAR perception processing and classification, one for the autonomy system), data loggers and the communication system, sits in the cowl panel of the vehicle. The sensors are positioned per Figure 1.
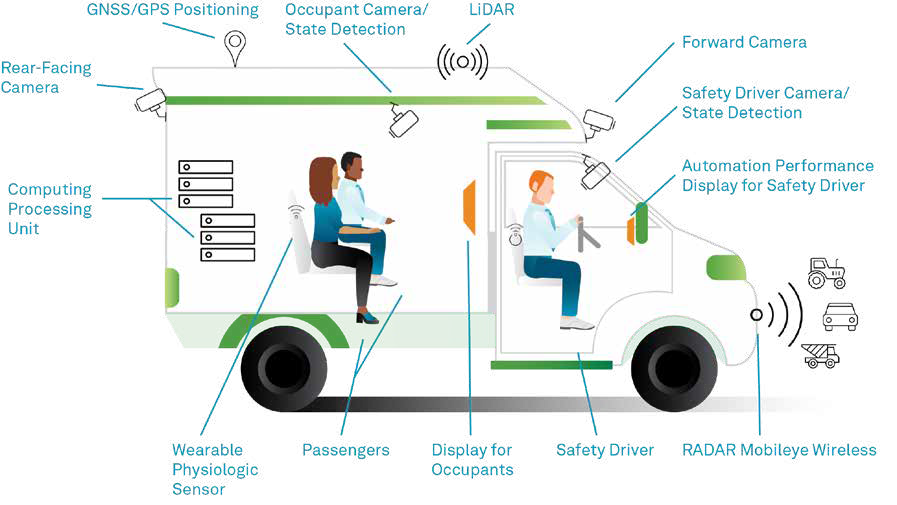
Figure 1
Once AutonomouStuff delivered the equipped vehicle, the UI team added more sensors to monitor the weather and for the physiological assessments. UI and AutonomouStuff completed the initial development and testing of the ADS Transit vehicle in early 2021.
In advance of the actual testing, Madison, Wisconsin-based Mandli Communications, was selected to create a high-definition map of the ADS for Rural America route. The created map allows the vehicle to identify where it is on the road within 10 centimetres (3.9 inches). Further, the Mandli vehicle has pavement scanners that can detail cracks in the pavement as small as 5 millimetres (0.2 inches) wide.
Using GNSS and LiDAR, the Mandli team gathered lane striping, intersections, shoulders, surface conditions and road features from the route. The data was then post-processed to create a 3D terrain map, which is then overlayed with the roads, buildings and other mapped features onto that terrain using LiDAR data. Once cleaned, UI loaded the map on the vehicle and into the Apollo autonomy stack.
The Apollo Open Platform is an open source self-driving vehicle tech platform developed by Baidu. It includes a complete hardware and software service solution with cloud data services, software, vehicle and hardware platform.
As part of the open source code and capabilities, Apollo incorporates obstacle perception, trajectory planning, vehicle control, vehicle operating systems, as well as a complete set of testing tools and other functions.
AutonomouStuff, as a partner with Baidu, expanded the Apollo Kit to comprise the drive-by-wire vehicle platform, GNSS and inertial measurement unit (IMU) and pre-configured computing. The drive-by-wire vehicle platform provides access to steering, shifting, acceleration and braking while the GPS and IMU support localisation along with an electronic control unit (ECU) that is preconfigured with the operating system.
David Van Geyn, the open autonomy engineering manager at Hexagon | AutonomouStuff, explained, “The flexibility of the Apollo software stack facilitated necessary customisation. During every phase, we are tuning and adapting the software to reduce latency, tune behaviour and improve vehicle performance across many metrics.”
The UI automated shuttle bus hit the rural roads of Iowa over the fall of 2021 to begin gathering data. The first of six phases involved gathering autonomous vehicle data through 10 different drives of the entire route. To optimise the data, the drives for phase 1 had a particular focus on controlled access roadways (interstates).
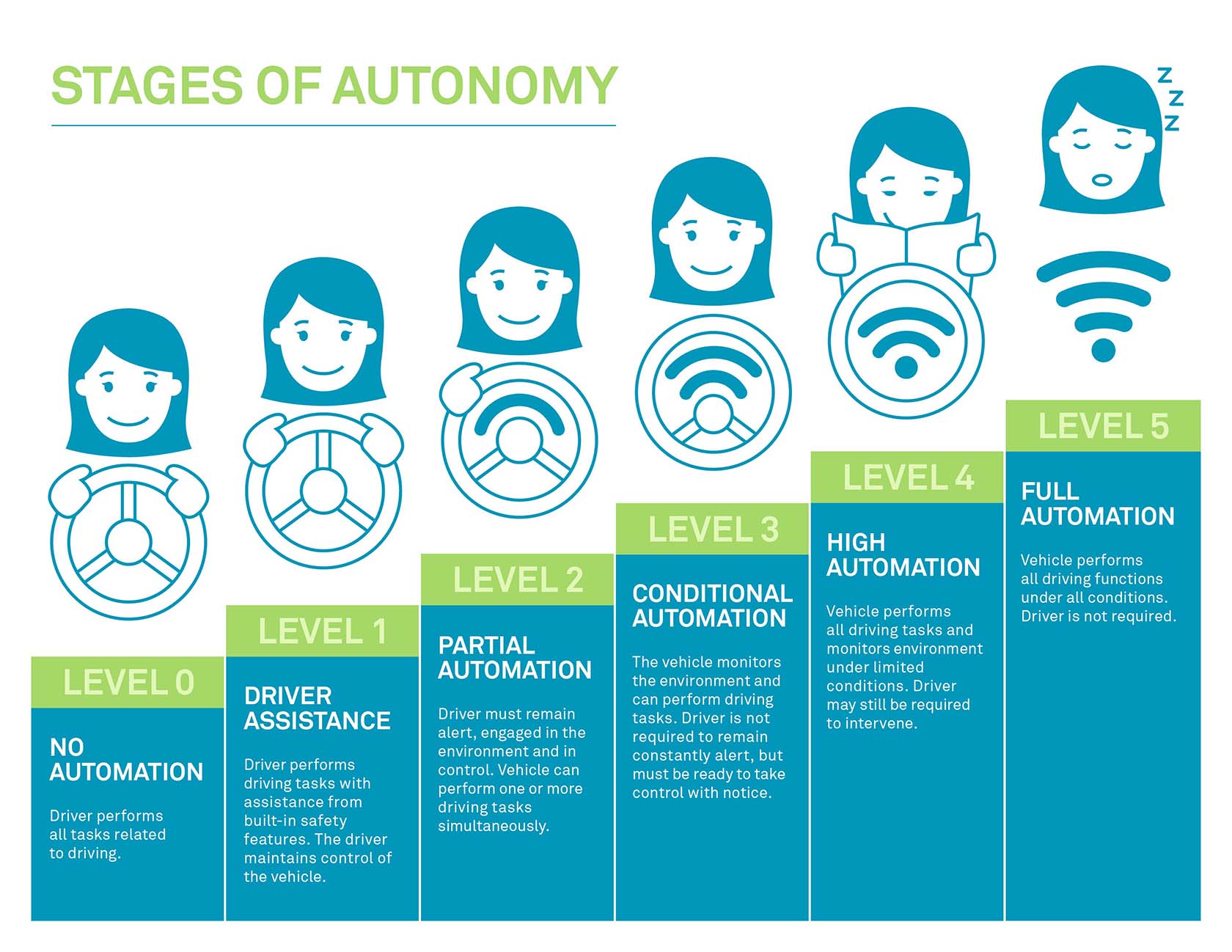
During the first phase, the vehicle navigated along controlled-access highways, travelling at normal highway speeds in mixed traffic which included heavy trucks, wide loads and slow-moving vehicles. Utilising the onboard sensors and high-definition map, the vehicle was able to maintain lateral and longitudinal position via automation. All other parts of the route were driven under Level 2 automation or manual control via the safety driver (see Stages of Autonomy Figure 2).
Figure 2
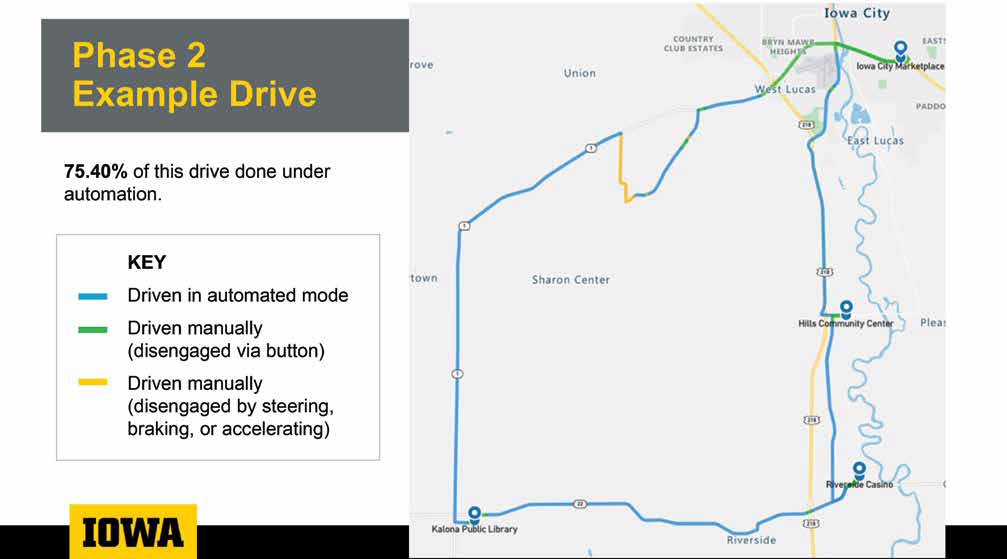
The results of one of the second phase drives is shown in Figure 3. The blue line indicates where the team operated the shuttle under automation, and the green line shows where they had to drive manually. More of the route was able to be driven in automation for the first and second phases than was required for the project, allowing the team to collect more valuable data and target specific focus areas for future development and improvement.
The second phase of the ADS for Rural America project built on the first, expanding the automation elements to include on/off ramps as well as some town speed limit changes. That phase, which completed 18 drives, was completed in March 2022 with improvements to the technology stack as needed.
In the second phase, a few of the areas of adjustment have been related to vehicle max speed, acceleration/deceleration, turning and object detection.
For instance, Van Geyn said, “A simulated vehicle will reach a certain speed, say 80 kilometres per hour (50 miles per hour), and hold exactly that speed, whereas a real vehicle might vary by small percentage points because of imperfect control, a headwind or tailwind, etc. Even a small percentage variation could cause the automated system to not perform as expected or shut down. The autonomy system must account for those real-world conditions.”
Figure 3
Figure 4 provides an example of key performance requirements that the team is seeking, with emphasis on evaluating performance with approaching vehicles and stop signs. During each phase, the collected rural data helps the project team and AutonomouStuff refine the tech stack further for enhanced reliability and robustness of autonomy.
Long-map issues have been a key area of adjustment. The Apollo stack was originally designed for shorter length routes with similar road types with each version of the software focusing on specific operational design domains— not 75 kilometre (47 mile) routes with continually varying conditions. Ahmad added, “We know there are situations where autonomy cannot work yet. We expect to have mixed results— the idea is that we learn where it works and where it doesn’t. We know that merging will be one of the most challenging for a machine just as it is for a human.”
Overall, the UI team has been very pleased with the results, even beyond the significant amount of data collected.
Given that controlled access roadways and highways constitute the majority of the route, about 60% of the route was under automation as of Phase 1.
Ahmad said, “AutonomouStuff has been very creative about taking the capabilities of the [autonomy] stack and finding solutions or potential workarounds by improving the software in the context of where we are in Iowa or some other way.”
As well, residents in the region are able to volunteer to participate as passengers—24 participated during Phase 1. They were surveyed about their experiences on board the automated shuttle bus (always with a safety driver and co-pilot), while having biometric data recorded and synchronised with camera footage and raw data from LiDAR and RADAR sensors.
As the project continues through its phases, the team will continue adding automation and increase the complexity of ADS technologies. Through the continuous improvement enabled by the software stack, the team can compare data across phases and levels of automation.
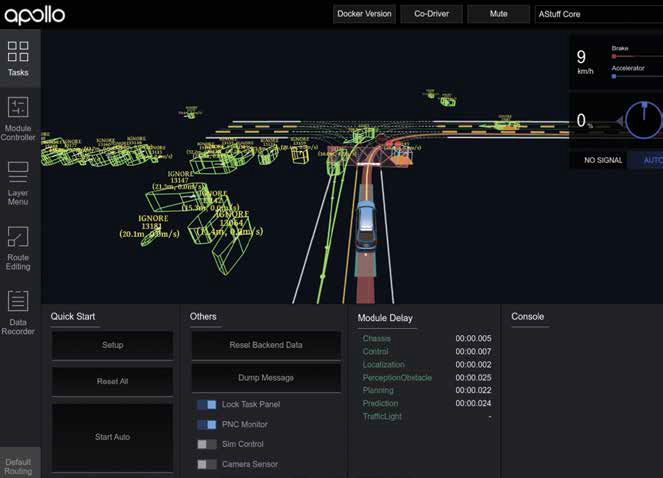
Figure 4
The ADS for Rural America project phases three to six will be completed between June 2022 and May 2023. Phase three will focus on driving through urban communities, phase four along unmarked and gravel roads, phase five will be vehicle-to-everything (V2X) and phase six will add parking areas and the full route. Across all phases, data is collected, and the entire route is driven, regardless of whether the automation or autonomous systems are active.
By the end of the study, the ADS for Rural America project will gather and generate a wealth of publicly available data on rural roadways that can address a variety of questions among a diverse set of end-users to safely integrate ADS into all types of U.S. roadways.
Data collected will be provided to the U.S. Department of Transportation to support safety and rulemaking priorities and be available to researchers and developers for continuous advancement in ADS.
Ahmad concluded, “We are especially proud that this entire project, which looks to focus on a global challenge, is facilitated by Midwestern companies. The results of ADS for Rural America project will emphasise the importance of autonomous vehicles working in all areas, rural and urban, to deliver a connected America.”
Read the full PDF here:
Contact our sales team for product, services, software or training inquiries or contact our support team to speak with an expert technician.