AGRICULTURE

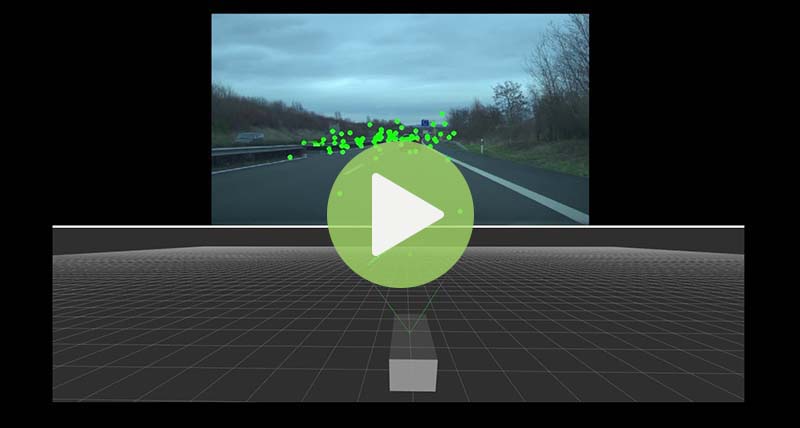
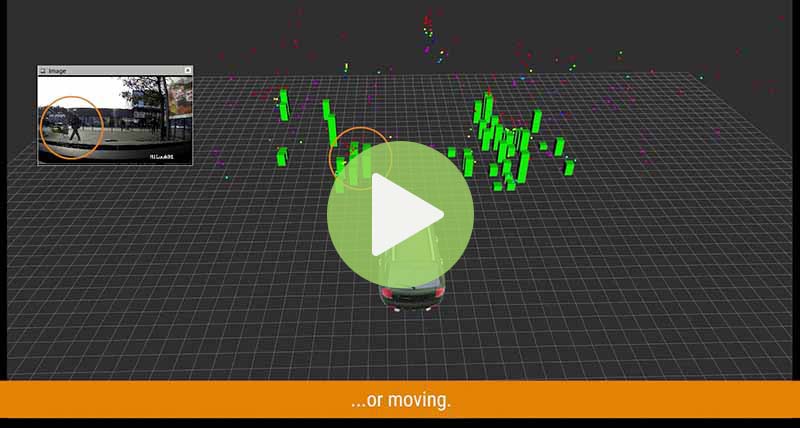
The smartmicro sensor UMRR-96 Type 153 Automotive is a 77-81GHz radar for multiple automotive applications. The corner radar features 4D/UHD technology, has a range of up to 120m, and a 130-degree field of view. The sensor aims at short and medium range and very wide horizontal angular coverage, providing short-, medium- and long-range mode. The smartmicro radar has a small size, is very robust, and works even in adverse conditions. It is almost unaffected by weather, independent of sunlight, and has a high performance in a wide temperature interval.
| Long Range Mode | Medium Range Mode | Short Range Mode | ||
|---|---|---|---|---|
| Operating Frequency [GHz] | 79 (77…81) | 79 (77…81) | 79 (77…81) | |
| Range I | Min/Max [m] I | Min: 0.8 Max: 120 | Min: 0.4 Max: 55 | Min: 0.15 Max: 19.3 |
| Discrimination [m] | < 1.2 | < 0.6 | < 0.3 | |
| Accuracy [m] | < 0.5 or 1% (bigger of) | < 0.3 or 1% (bigger of) | < 0.15 or 1% (bigger of) | |
| Velocity | Min/Max [km/h] | -340/ | -340/ | -400/ |
| Discrimination [m/s] | < 0.3 | < 0.3 | < 0.3 | |
| Accuracy [m/s] | < 0.15 | < 0.15 | < 0.15 | |
| Angle II | FoV of Azimuth [°] | ≥100 (squint beam) | ≥130 | ≥130 |
| FoV of Elevation [°] | 15 | 15 | 15 | |
| Discrimination [°] | ~30 (optional) | ~30 (optional) | ~30 (optional) | |
| Accuracy of Azimuth [°] III | ≤ 1 (@<50° from boresight) | |||
| Accuracy of Elevation [°] III | ≤ 2 (@<10° from boresight) | |||
| Initialization Time [s] | < 4 | |||
| Update Cycle Time [ms] | ≤ 55 | |||
| Processing Latency [ms] | 2-4 Cycles | |||
| Operating Voltage [V] IV | 8 ~ 24 | |||
| Power Consumption [W] | < 5 | |||
| Max. Transmit Power (EIRP) [dBm] | <25 | |||
| Operating Temperature [°C] | -40 ~ +85 | |||
| Humidity [%] | 0 … 95 (non-condensing) | |||
| Sensor Weight [g] | ≤ 153 | |||
| Dimension (H/W/D) [mm] | 97 × 80 × 17.7 plus connector 103.8 × 80 × 22.45 incl. connector | |||
| Interfaces | Primary CAN V2.0b (passive) (CAN FD 2Mbit/s sleep mode capable optional by software) Secondary CAN FD 5Mbit/s (optional by software), 2-wire Automotive Ethernet 100Mbit (optional by software) TJA1100 Compliance with 100BASE-T1 IEEE 802.3bw | |||
| Connector | 8 Pin plug ACES / TE Connectivity | |||
| Model No. | UMRR-96xxxx | |||
| Shock [grms] | 100 | |||
| Vibration [grms] | 14 | |||
| IP | 67 | |||
| Pressure / Transport altitude [m] | 0…10.000 | |||
I Typical values; may vary to higher or lower values depending on clutter environment. All values given for bore sight. Please note that the Radar system – like any other sensor system – although being well optimized and providing excellent performance, will not achieve a 100% detection probability and will not achieve a false alarm rate equal to zero. Presence detection below is available. Minimum range may be reduced customer specific depending on local frequency regulations.
II Total field of view is angle interval where reflectors can be detected; 3dB field of view is narrower. Accuracy specified at bore sight. Angular accuracy specified at bore sight, falls off towards larger angles.
III Measured for point reflector at bore sight with >23dB S/N. Falls off toward larger absolute angles.
IV Measured at connector.