AGRICULTURE

Leverage your Global Navigation Satellite Systems (GNSS) and inertial data for the best source of truth post-mission with Waypoint post-processing software. Built on decades of positioning expertise and trusted by the companies building maps for the world, Waypoint software maximises the accuracy of GNSS and inertial data from inertial navigation systems (INS) using powerful processing, detailed quality control information and application-specific profiles to streamline your workflow. The software’s Flexible Export Wizard outputs results at any vehicle location in the required data format, rate and coordinate frame to reduce your learning curve and start producing quality results quickly.
Waypoint software supports the development of autonomy systems by delivering an accurate, reliable and resilient source of truth post-mission. Leveraging post-processed output minimises any inertial error growth experienced in real-time to output a smooth truth trajectory with more accurate position, velocity and attitude.
No matter your application, Waypoint software has a product and subscription that meets your post-processing needs.
As Waypoint software’s flagship product, Inertial Explorer (IE) maximises post-mission performance of your GNSS+INS hardware by outputting a truth trajectory with centimetres-level position, velocity and attitude accuracy no matter where in the world you operate. IE supports loosely coupled and tightly coupled processing modes for integrating GNSS and inertial data, delivering highly precise results even when lower grade inertial sensors are used, including high-end fibre optic gyro (FOG) or ring laser gyro (RLG) IMUs and lower grade sensor technology like micro electrical mechanical systems (MEMS).
With built-in workflows and a flexible project wizard, you can reduce your learning curve and product quality results quickly. Automated processing environment detection for static and kinematic profiles uses appropriate processing settings to automatically streamline your workflow. For more experienced users, a wide range of processing configuration options are available to fully customise your workflows for your unique application.
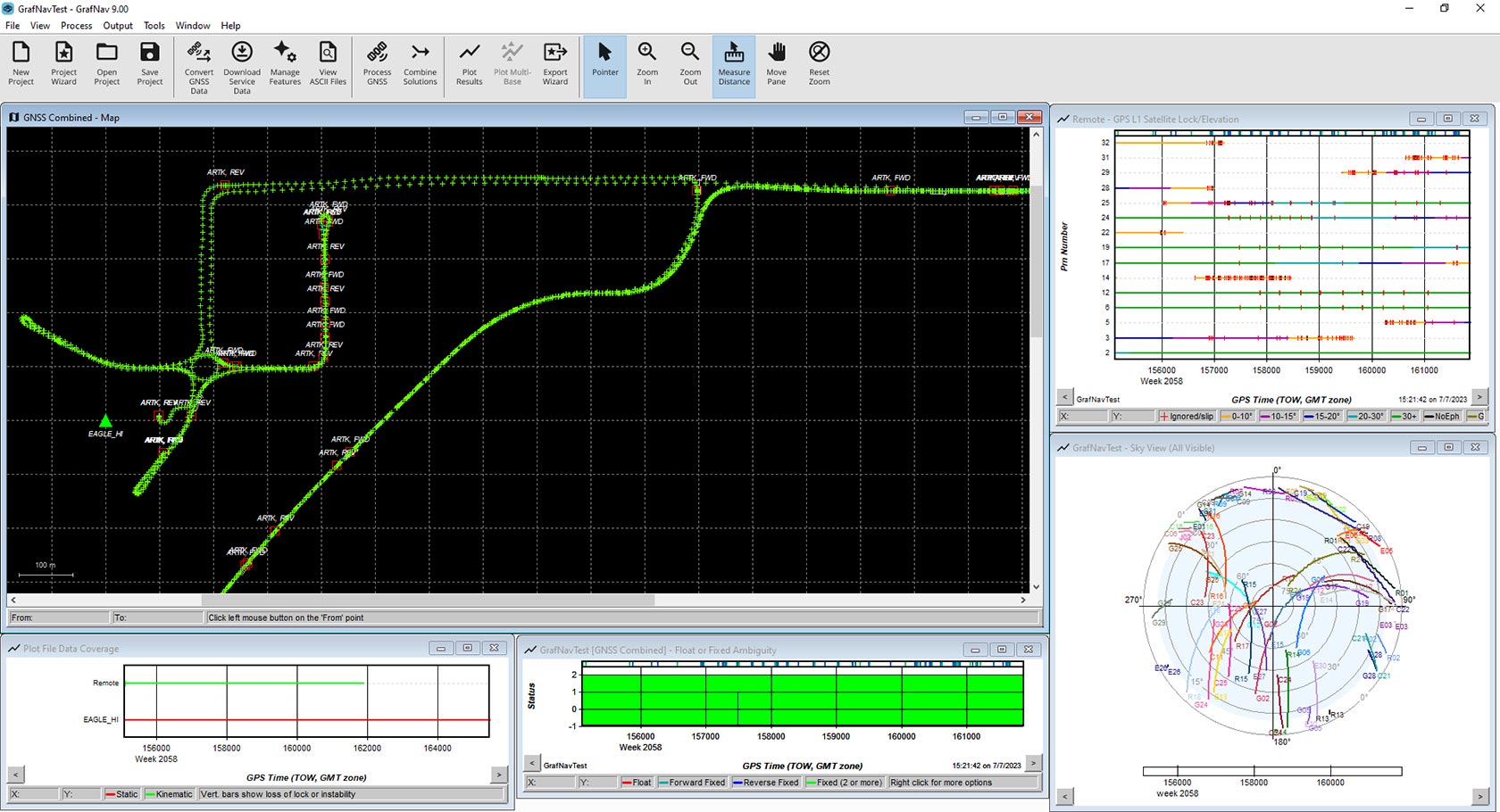
Waypoint’s post-processing software GrafNav is a powerful, highly configurable processing engine that leverages all available GNSS data to produce the most accurate static or kinematic GNSS trajectory. The software is flexible to work within your existing system by supporting generic data formats from third-party single and multi-frequency GNSS receivers. Users can add up to 32 base stations within each project, download precise satellite clock and orbit data from global reference stations across public networks, and achieve centimetre-level position accuracy using precise point positioning (PPP) corrections with kinematic trajectories.